DAVINCI ARM Project created to help exceptional people
Davinci arm project

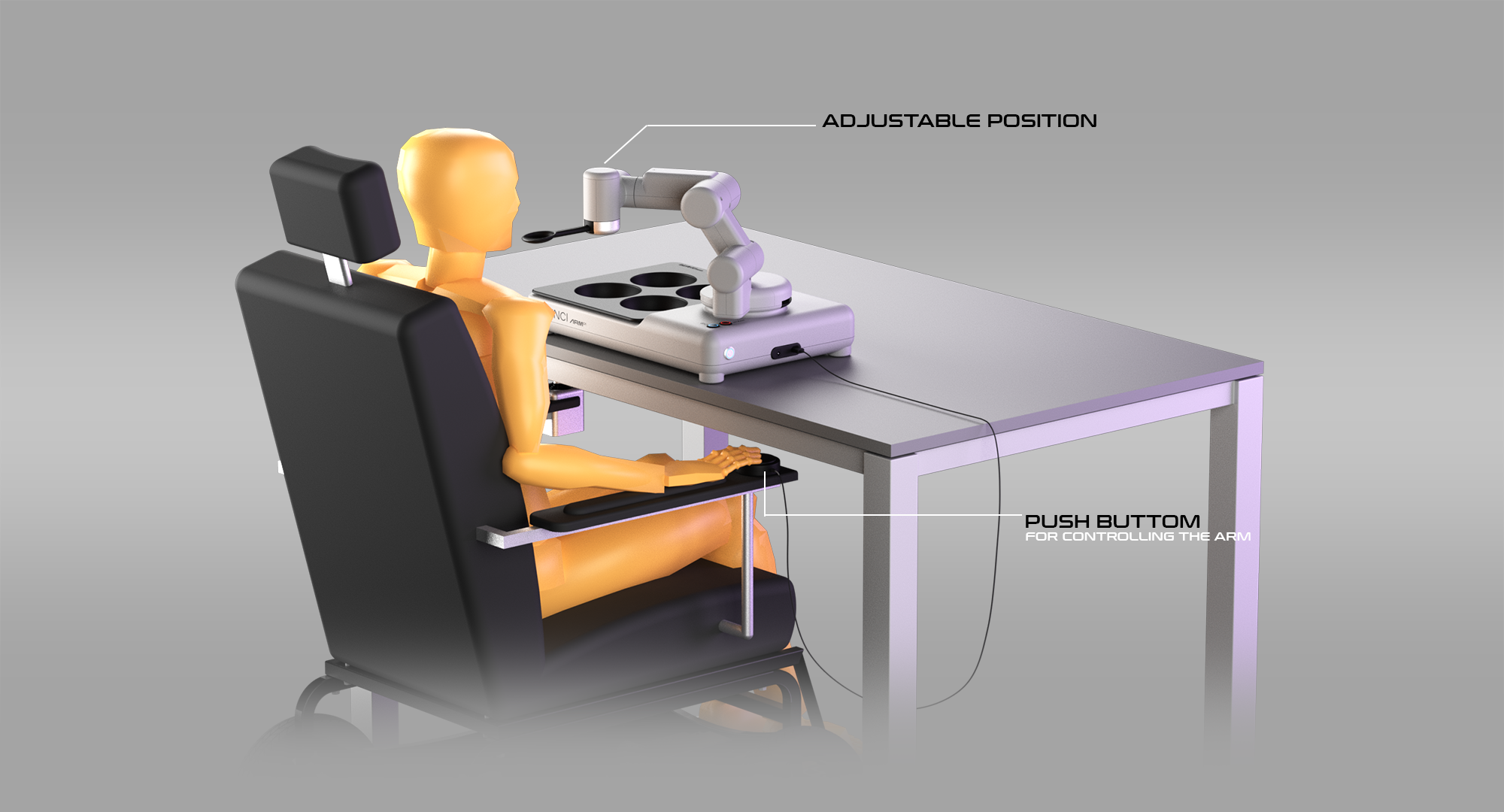
ADJUST TO YOUR NEEDS
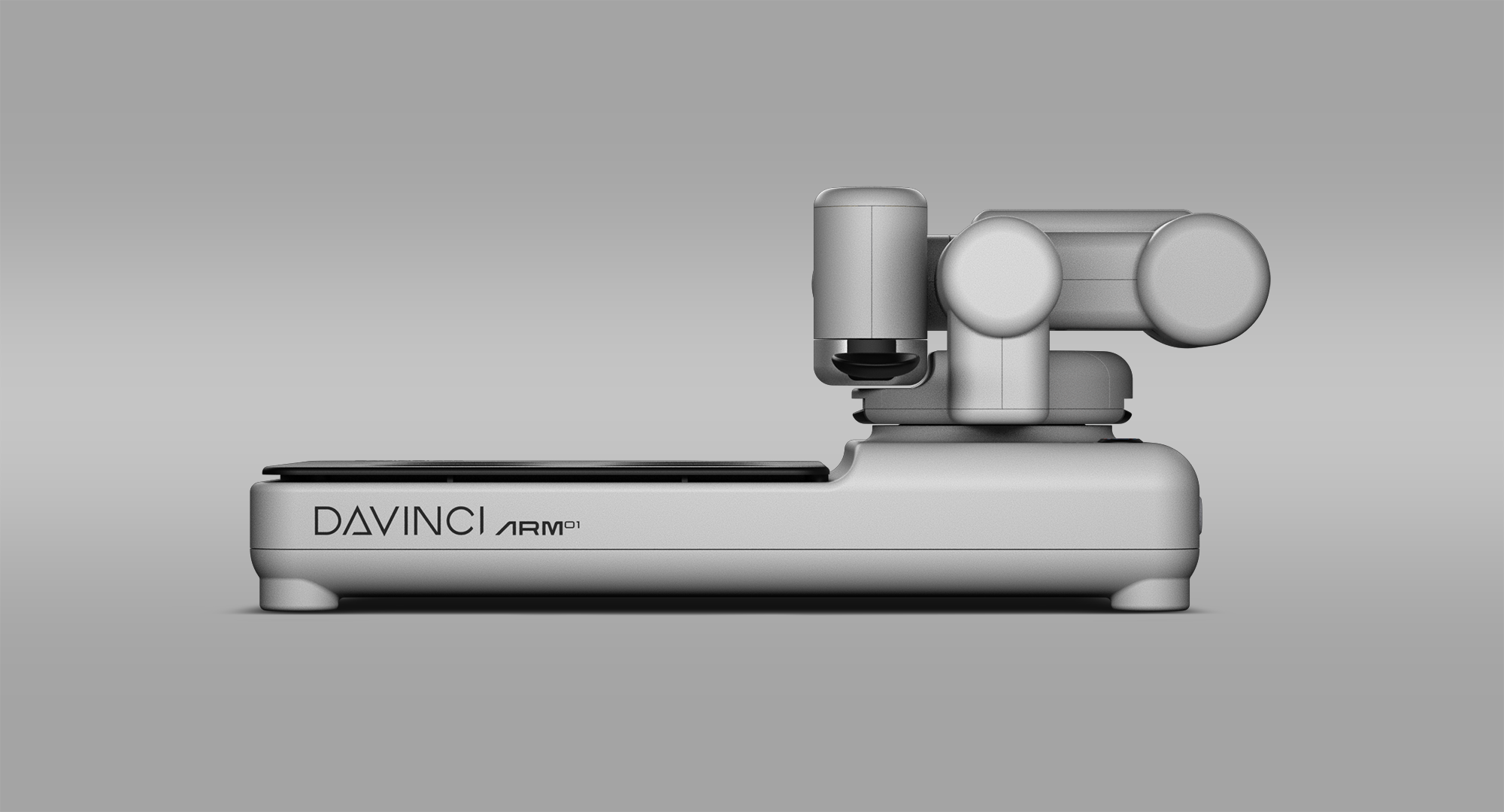
Thanks to the use of 6 joints, the arm can be freely set to any position, no matter if the user is sitting in a wheelchair or on a chair.
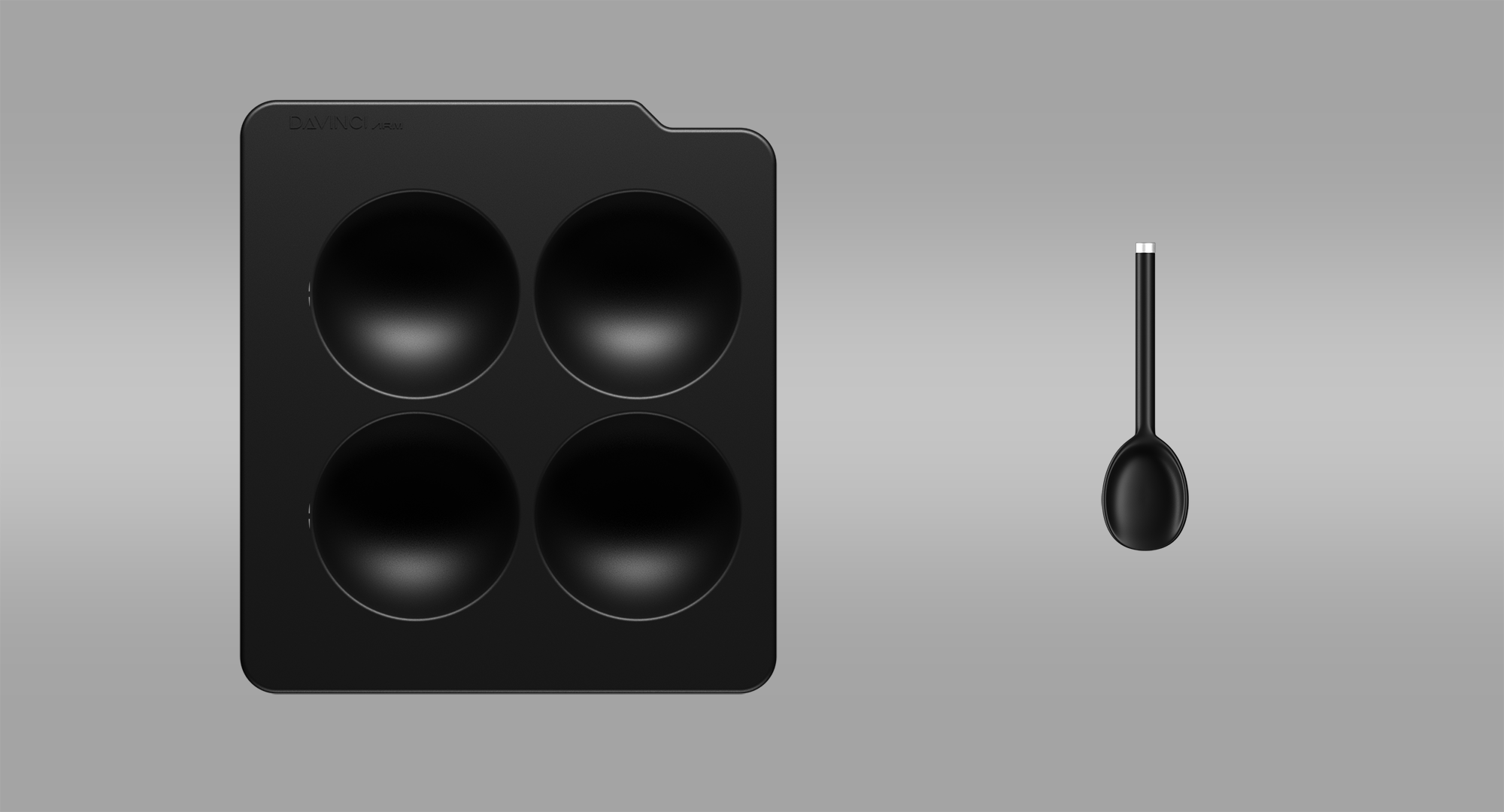
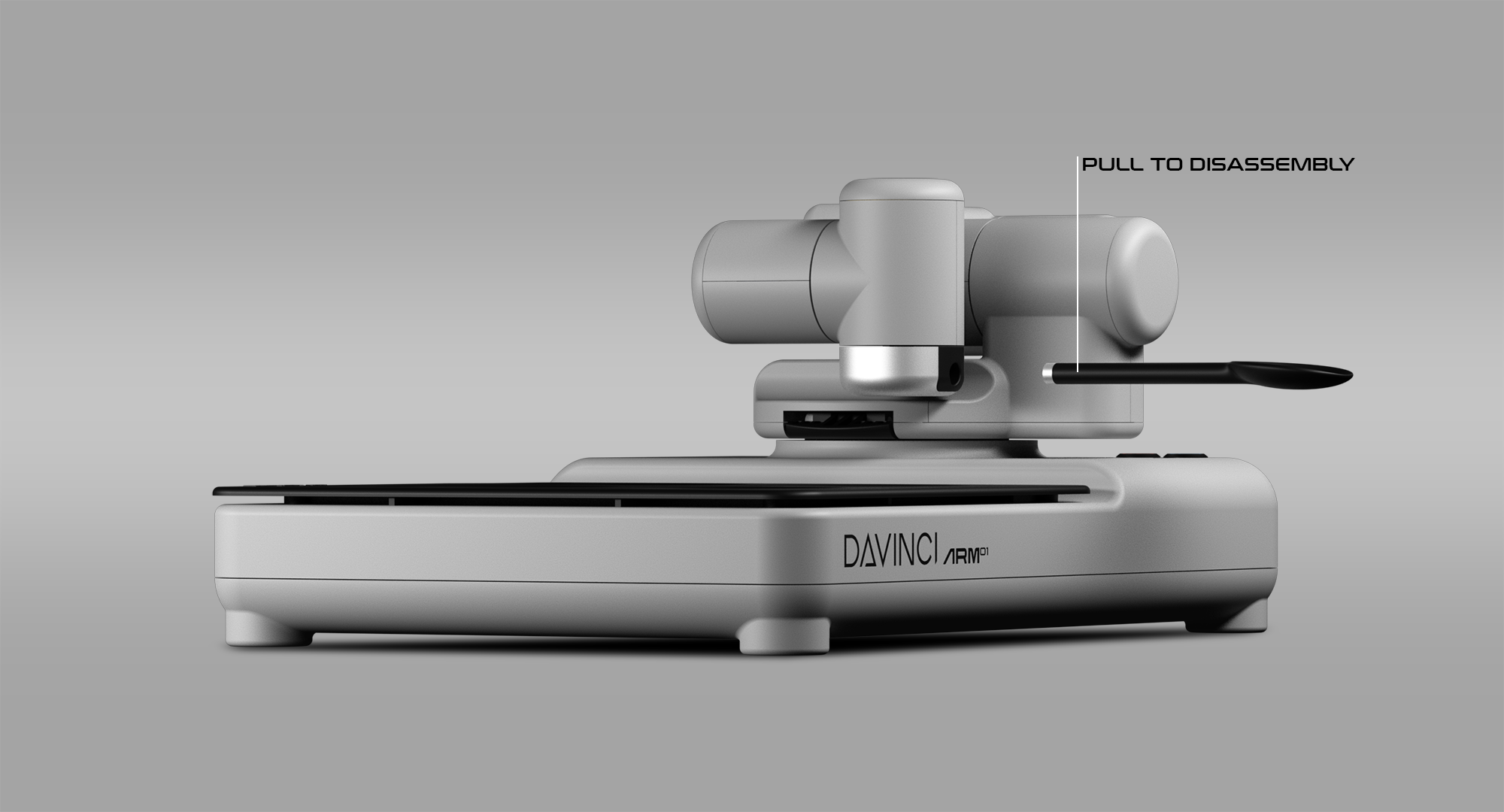
CLEANING
Easy to remove the tray and spoon thanks to the magnetic handle, just pull to detach.

STORAGE AND TRANSPORT
The DAVINCI arm is also designed for storage and transport. The arm can be easily detached from the platform and both parts can be hidden, e.g. in a drawer or cabinet. This prevents the device from dusting between meals.
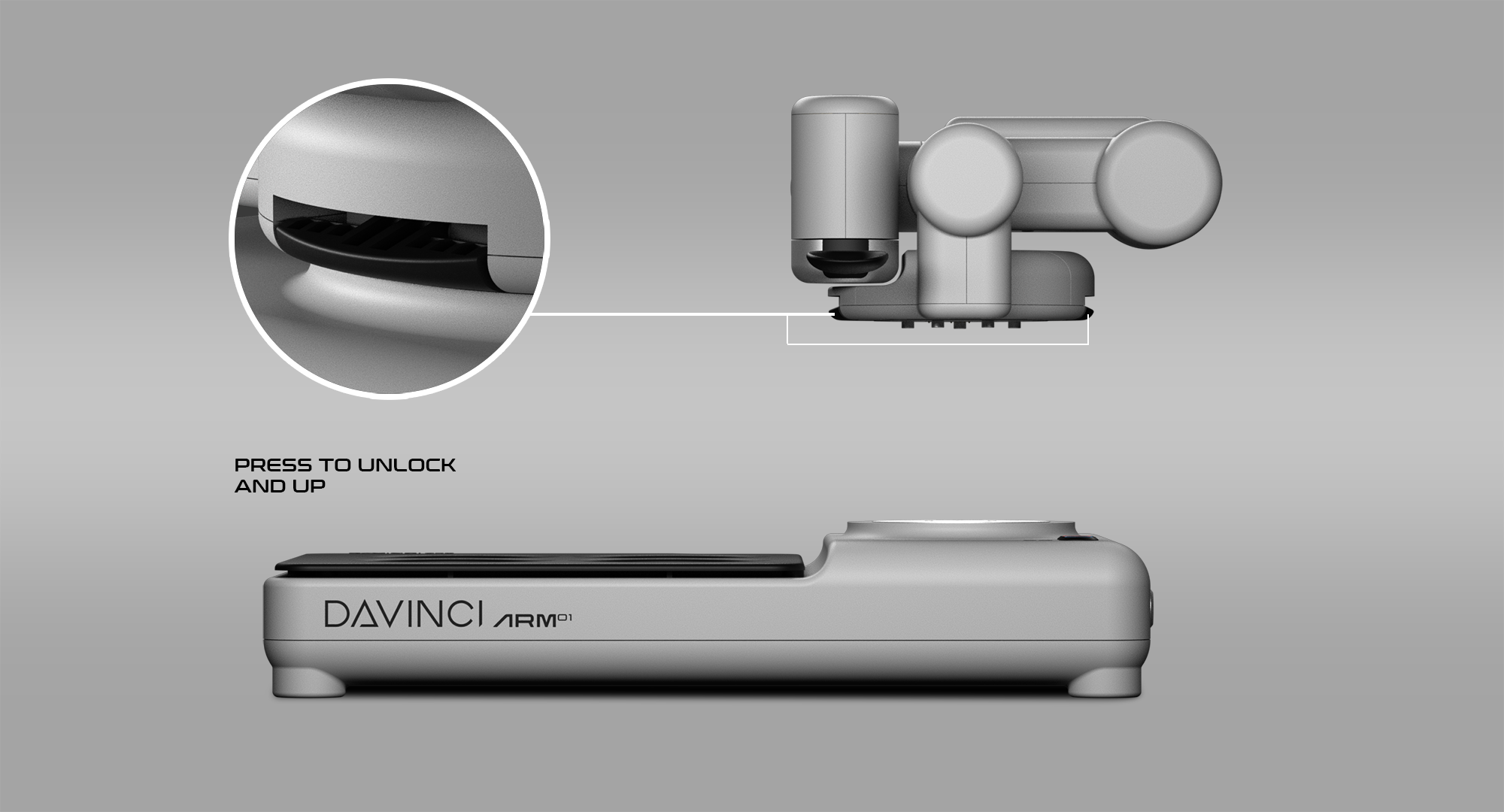

Thanks to a dedicated box, after removing the arm from the platform, you can easily transport the device without fear of damage.


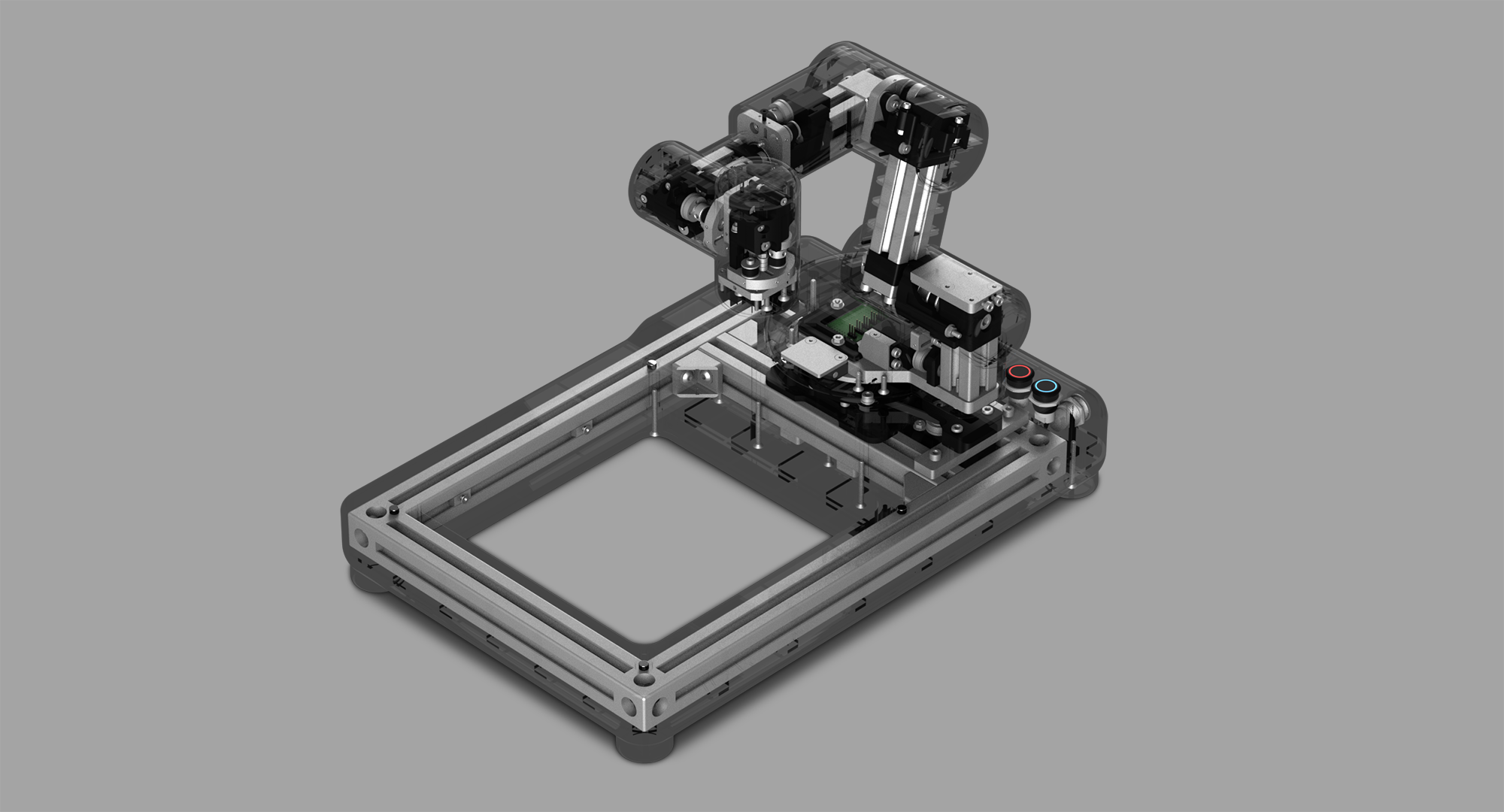
CONSTRUCTION
The entire structure is based on durable aluminum profiles and other components that affect the rigidity of the structure and the weight of the device. Additional ratios for the servos have also been used to increase the torque of each rotating joint.
The whole was designed using dedicated solutions.
The whole was designed using dedicated solutions.